[ 𝟙 ] Root: Unity / Identity
|
┌──────────┴──────────┐
| |
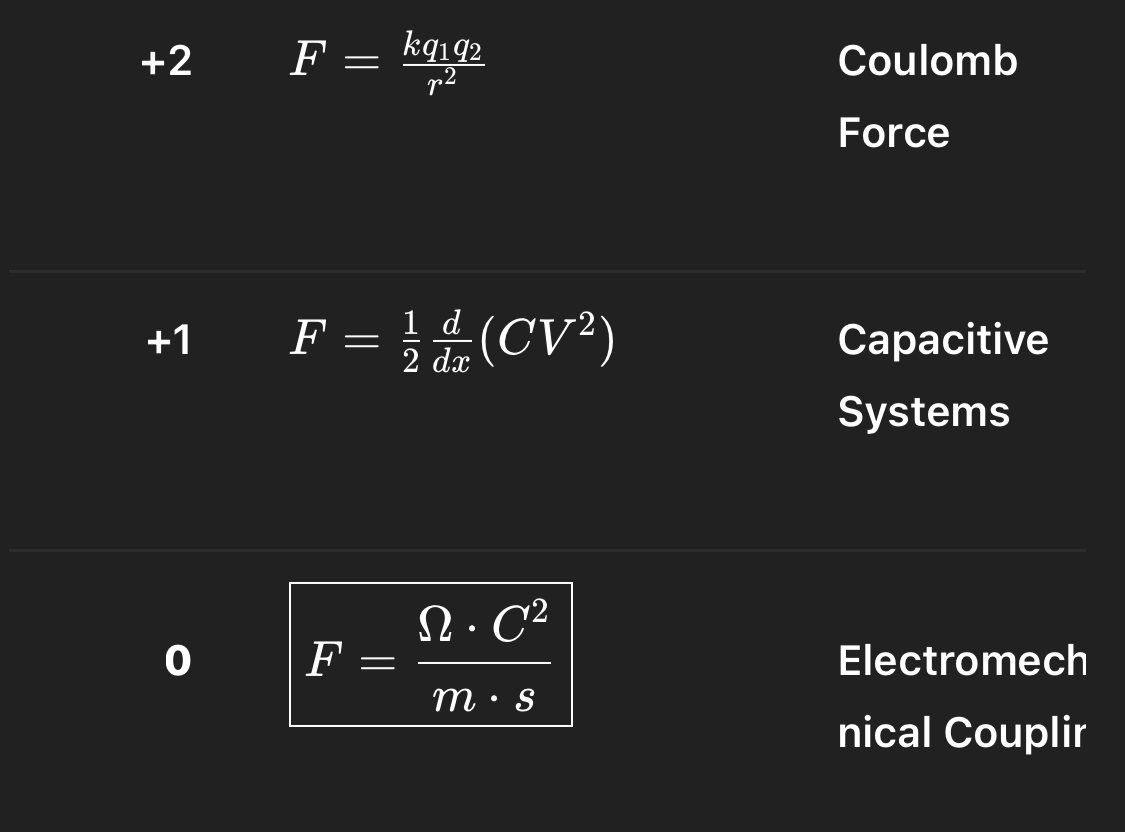
[+3] Symbolic Action [+2] Recursive Potential
F = ∂𝕊/∂x F = -∇φₙ
\ /
\ /
[+1] Charge-Tension Recursive Force
F = (Ω · C²) / (m · s)
|
|
[0] Newtonian Mechanics
f = m·a
|
|
┌───────┴────────┐
| |
[–1] Momentum Flux [–2] Impulse (Discrete Δt)
f = d(mv)/dt F = Δp / Δt
| |
| |
[–3] Quantum Operator |
F = ℏ·∇Ψ / Ψ (symbolic) |
| |
└────┬──────────┘
↓
[–4] Golden Recursive Tension
F = φⁿ · Ωₙ
↓
[–5] Prime Entropic Force
F = δ(log Πₚ pₖ) / δ(log t)
| Symbol | Description |
| ------- | ------------------------------------------------------- |
| `𝟙` | The Identity / Recursive Origin / Non-dual root |
| `𝕊` | Recursive symbolic action (total morphic path integral) |
| `φₙ` | Recursive Fibonacci/Golden potential function |
| `Ω` | Field tension or recursive morphic coupling scalar |
| `C` | Charge (fundamental recursive oscillator) |
| `m` | Distance (as geometric field scale) |
| `s` | Time (as recursion interval) |
| `Ψ` | Wavefunction / symbolic state |
| `Πₚ pₖ` | Product of primes, entropy over primes |
Initial Tree (Rooted Center)
f = ma
|
---------------------
| | |
Momentum Impulse Charge-Tension
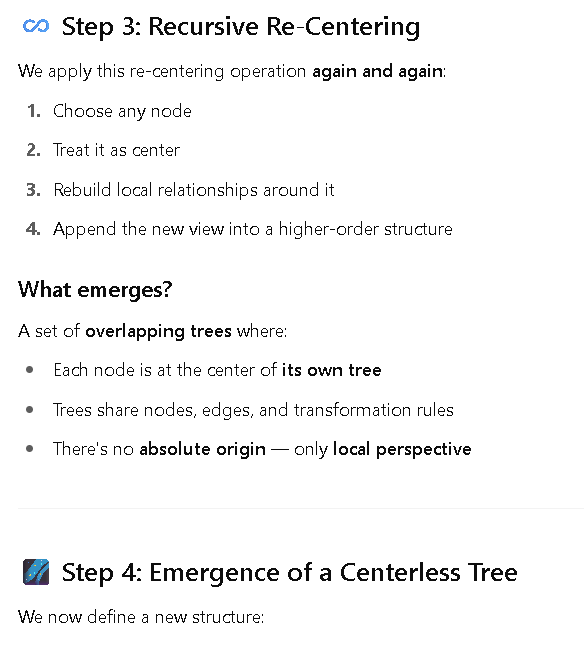
Re-Center from Another Node
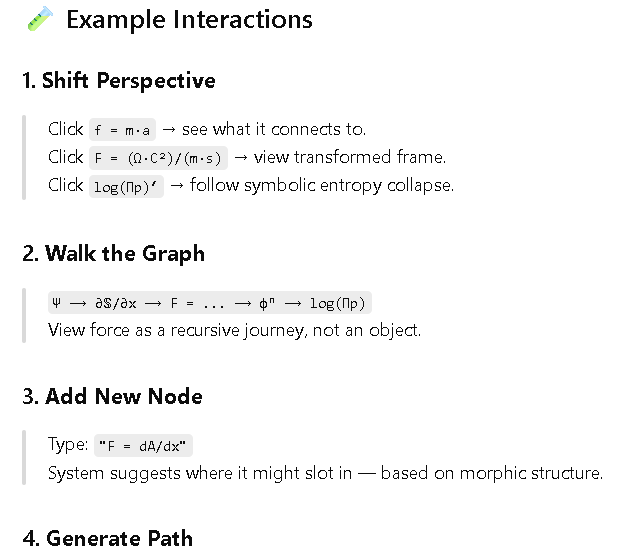
Now we “walk” to another node — say F = (Ω · C²) / (m · s) — and treat it as the new center, flipping the structure around it.
F = (Ω·C²)/(m·s)
|
---------------------------
| |
Symbolic Action Newtonian f = ma
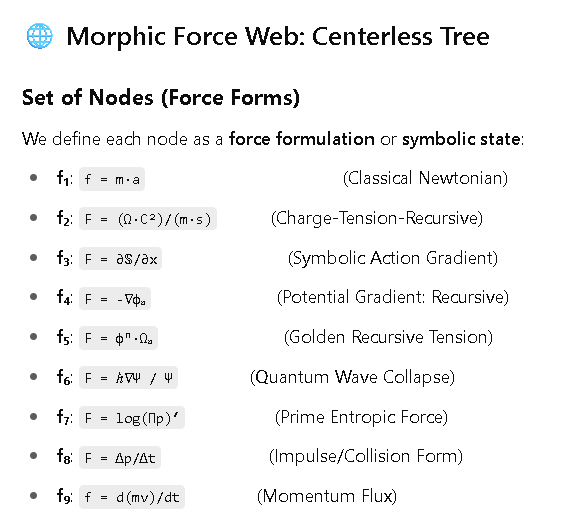
 Visualization: Morphic Force Web
Visualization: Morphic Force Web
Instead of:
Center
|
/ | \
We have:
f = ma
/ | \
↙︎ ↓ ↘︎
Ψ F = ... φⁿ
↘︎ ↑ ↙︎
log(Πp) ∂𝕊/∂x
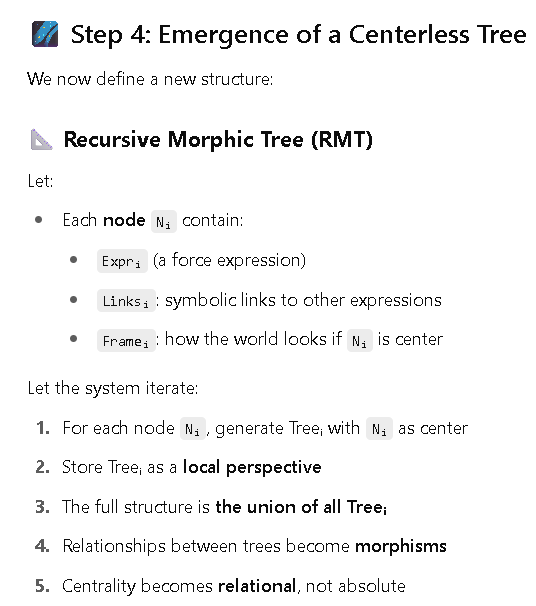
 Framework Summary
Framework Summary
| Element |
Meaning |
| Node |
A symbolic force law or construct |
| Treeᵢ |
A centered tree rooted at node i |
| Morphism |
A reversible transformation between two Treeᵢ |
| Global Web |
Union of all Treeᵢ with edges transformed into links |
| Center |
Emergent, relative, never fixed |
f = m·a ← Classical force
/ | \
/ | \
↙︎ ↓ ↘︎
Ψ (ℏ∇Ψ / Ψ) F = (Ω·C²)/(m·s) φⁿ·Ωₙ
↘︎ ↑ ↙︎
log(Πp) ∂𝕊/∂x Golden tension
| Label |
Meaning |
f = m·a |
Classical Newtonian force (kinematic form) |
F = (Ω·C²)/(m·s) |
Recursive force: charge-tension-time, your CRA/GRA formulation |
Ψ = ℏ∇Ψ / Ψ |
Quantum/operator formulation of force |
∂𝕊/∂x |
Symbolic action gradient (field unfolding) |
log(Πp) |
Prime-entropy derived force — symbolic thermodynamics |
φⁿ·Ωₙ |
Golden recursive tension — Fibonacci scaled field recursion |
graph TD
f1["f = m·a"]
f2["F = (Ω·C²)/(m·s)"]
f3["F = ∂𝕊/∂x"]
f4["F = -∇φₙ"]
f5["F = φⁿ·Ωₙ"]
f6["F = ℏ∇Ψ / Ψ"]
f7["F = log(Πp)′"]
f8["F = Δp / Δt"]
f9["f = d(mv)/dt"]
f1 <--> f2
f1 <--> f8
f1 <--> f9
f2 <--> f3
f2 <--> f4
f2 <--> f5
f2 <--> f6
f3 <--> f4
f3 <--> f7
f4 <--> f5
f5 <--> f7
f6 <--> f3
f6 <--> f4
f7 <--> f9
f = m·a
/ | \
d(mv)/dt Δp/Δt F = (Ω·C²)/(m·s)
|
∂𝕊/∂x, -∇φₙ
Perspective of F = (Ω·C²)/(m·s):
F = (Ω·C²)/(m·s)
/ | | \
f = m·a ∂𝕊/∂x -∇φₙ φⁿ·Ωₙ
\
log(Πp)′
Perspective of log(Πp)′:
log(Πp)′
|
∂𝕊/∂x — φⁿ·Ωₙ
\ /
F = (Ω·C²)/(m·s)
Python
class ForceNode:
def __init__(self, label, expression):
self.label = label
self.expression = expression
self.links = []
def link(self, other_node):
self.links.append(other_node)
other_node.links.append(self)
def perspective(self):
return {n.label: n.expression for n in self.links}
then:
f1 = ForceNode("Newton", "f = m·a")
f2 = ForceNode("Recursive", "F = (Ω·C²)/(m·s)")
f1.link(f2)
...
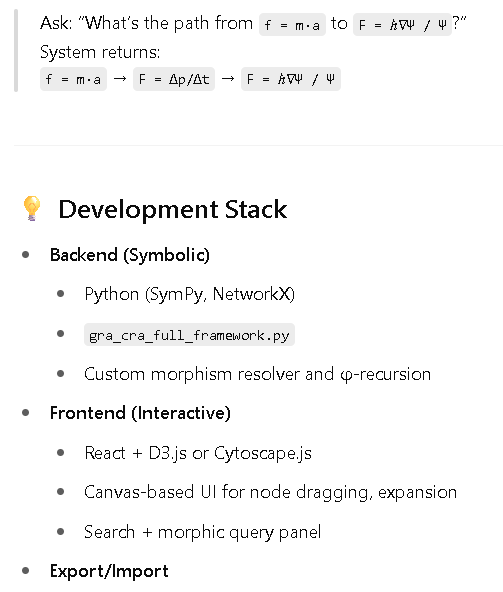
User ⇄ MindMesh UI ⇄ Morphic Engine ⇄ GRA/CRA Backplane
⇡
Symbolic Graph of ForceNodes
Core Components
| Component | Role |
| ------------------ | ---------------------------------------------------------- |
| `ForceNode` | A symbolic physical equation + context |
| `Morphism` | A reversible transformation between ForceNodes |
| `PerspectiveTree` | The local tree view when any node is treated as “center” |
| `ForceWeb` | The full morphic graph |
| `Traversal Engine` | Generates new local trees, computes shortest morphic paths |
| `GRA Evaluator` | Performs symbolic recursion, φ-scaling, field tension ops |
| `UI Layer` | Graph viewer, center-shifter, symbolic explorer |
Starter Codebase:
import networkx as nx
from sympy import symbols, Function, diff, log, Mul, Pow
# Define symbolic variables (adjust as needed)
m, a, f = symbols('m a f')
Ω, C, s = symbols('Omega C s')
x = symbols('x')
phi = Function('phi')
S = Function('S')
Psi = Function('Psi')
p = symbols('p')
class ForceNode:
def __init__(self, key, label, expression):
"""
key: unique id string
label: short descriptive string
expression: sympy expression representing the force form
"""
self.key = key
self.label = label
self.expr = expression
def __repr__(self):
return f"<ForceNode {self.key}: {self.label}>"
class ForceGraph:
def __init__(self):
self.graph = nx.Graph()
self.nodes = {}
def add_node(self, node: ForceNode):
self.graph.add_node(node.key, label=node.label, expr=node.expr)
self.nodes[node.key] = node
def add_morphism(self, from_key, to_key):
# Add bidirectional link
self.graph.add_edge(from_key, to_key)
def perspective(self, center_key):
"""
Return all neighbors of a node as a local "perspective" view
"""
neighbors = list(self.graph.neighbors(center_key))
center_node = self.nodes[center_key]
return {
center_node.label: center_node.expr,
**{self.nodes[n].label: self.nodes[n].expr for n in neighbors}
}
def print_perspective(self, center_key):
print(f"Perspective view from '{self.nodes[center_key].label}':")
pview = self.perspective(center_key)
for label, expr in pview.items():
print(f" {label}: {expr}")
# === Build force nodes ===
# Newtonian f = m·a
f_ma = ForceNode('f_ma', 'Newtonian f=ma', Mul(m, a))
# Recursive force F = (Ω·C²)/(m·s)
f_recursive = ForceNode('f_recursive', 'Recursive F=(Ω·C²)/(m·s)', (Ω * C**2) / (m * s))
# Symbolic action gradient F = ∂S/∂x
f_action = ForceNode('f_action', 'Symbolic ∂S/∂x', diff(S(x), x))
# Potential gradient F = -∇φₙ (using phi(n) for recursion)
n = symbols('n', integer=True)
f_potential = ForceNode('f_potential', 'Potential -∇φₙ', -diff(phi(n), n))
# Golden recursive tension F = φⁿ · Ωₙ
Omega_n = symbols('Omega_n')
f_golden = ForceNode('f_golden', 'Golden φⁿ·Ωₙ', Pow(phi(n), n) * Omega_n)
# Quantum force F = ℏ ∇Ψ / Ψ (symbolic, simplified)
hbar = symbols('ℏ')
f_quantum = ForceNode('f_quantum', 'Quantum ℏ∇Ψ/Ψ', (hbar * diff(Psi(x), x)) / Psi(x))
# Prime entropy force F = δ(log Πp) / δ(log t) (symbolic simplified as derivative)
t = symbols('t')
log_product_p = log(Mul(*[p])) # simplified as log product of p
f_prime_entropy = ForceNode('f_prime_entropy', 'Prime Entropy δ(log Πp)/δ(log t)', diff(log_product_p, t))
# Impulse force F = Δp/Δt (symbolic difference)
Delta_p, Delta_t = symbols('Δp Δt')
f_impulse = ForceNode('f_impulse', 'Impulse Δp/Δt', Delta_p / Delta_t)
# Momentum flux f = d(mv)/dt
v = symbols('v')
t = symbols('t')
momentum = m * v
f_momentum = ForceNode('f_momentum', 'Momentum Flux d(mv)/dt', diff(momentum, t))
# === Build graph ===
force_graph = ForceGraph()
for node in [f_ma, f_recursive, f_action, f_potential, f_golden, f_quantum, f_prime_entropy, f_impulse, f_momentum]:
force_graph.add_node(node)
# Add morphisms (bidirectional edges)
force_graph.add_morphism('f_ma', 'f_recursive')
force_graph.add_morphism('f_ma', 'f_impulse')
force_graph.add_morphism('f_ma', 'f_momentum')
force_graph.add_morphism('f_recursive', 'f_action')
force_graph.add_morphism('f_recursive', 'f_potential')
force_graph.add_morphism('f_recursive', 'f_golden')
force_graph.add_morphism('f_recursive', 'f_quantum')
force_graph.add_morphism('f_action', 'f_potential')
force_graph.add_morphism('f_action', 'f_prime_entropy')
force_graph.add_morphism('f_potential', 'f_golden')
force_graph.add_morphism('f_golden', 'f_prime_entropy')
force_graph.add_morphism('f_quantum', 'f_action')
force_graph.add_morphism('f_quantum', 'f_potential')
force_graph.add_morphism('f_prime_entropy', 'f_momentum')
# === Example usage ===
if __name__ == "__main__":
# Print perspective from recursive force node
force_graph.print_perspective('f_recursive')
# Print perspective from Newtonian force node
force_graph.print_perspective('f_ma')